2. Declarative Programming Techniques
"The nice thing about declarative programming is that you can write a specification and run it as a program. The nasty thing about declarative programming is that some clear specifications make incredibly bad programs. The hope of declarative programming is that you can move from a specification to a reasonable program without leaving the language."
- The Craft of Prolog, Richard O’Keefe
- An operation is declarative if it always returns the same results (when called with the same arguments) independent of any other computation state.
- A declarative operation is:
- independent,
- stateless,
- deterministic.
- Declarative programming is important because of two properties:
- Declarative programs are compositional.
- They consist of components that can each be written, tested, and proved correct independently of other components and of their own past history (previous calls).
- Reasoning about declarative programs is simple.
- Simple algebraic and logical reasoning can be used.
- Declarative programs are compositional.
- Not all programs can be easily written in the declarative model.
- As many components (in a program) as possible should be declarative.
- This chapter explains how to write practical declarative programs.
- The basic technique for writing declarative programs:
- Consider the program as a set of recursive function definitions.
- Use high-orderness to simplify the program structure.
1. Iterative computation
- An iterative computation is a loop whose stack size is bounded by a constant (independent of the number of iterations).
General schema
- Starts with an initial state S0 and transforms the state in steps until reaching a final state Sfinal:
- S0 -> S1 -> ... -> Sfinal
- General schema:
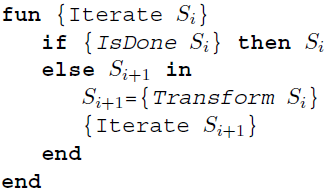
- Info:
- Functions IsDone and Transform are problem dependent.
- Stack size does not grow when executing Iterate.
Newton's method
- Newton's method for calculating the square root of a positive real number x is an iterative computation.
- It starts with a guess g and improves that guess iteratively until it is accurate enough.
- The improved guess g' is the average of g and x/g.
- g' = (g + x/g) / 2
fun {Sqrt X}
Guess = 1.0
in
{SqrtIter Guess X}
end
fun {SqrtIter Guess X}
if {GoodEnough Guess X} then Guess
else
{SqrtIter {Improve Guess X} X}
end
end
fun {Improve Guess X}
(Guess + X/Guess) / 2.0
end
fun {GoodEnough Guess X}
{Abs X-Guess*Guess}/X < 0.00001
end
fun {Abs X} if X<0.0 then ~X else X end end
- Additional info:
Assignment 1
- Define a function Abs that calculates the absolute value of a real number.
- The following definition does not work:
declare
fun {Abs X}
if X<0 then ~X
else X
end
end
- Why not? Correct it.
Hint
The problem is trivial.
Assignment 2
- Define a Cbrt function (cube root) that uses the Newton's method to calculate it.
- The formula for calculating the improved guess: g' = (2g + x/g2) / 3
Using local procedures
- Several helper functions are defined in the Newton's method program above: SqrtIter, Improve, GoodEnough, and Abs.
- Where to define helper functions?
- A function defined only as an aid to define another function should not be visible elsewhere.
- Dependency:
- SqrtIter is needed in Sqrt,
- Improve and GoodEnough are needed in SqrtIter,
- Abs is a utility function that could be used elsewhere.
- There are two basic ways to express this visibility:
- All the helper functions are defined in a local statement outside of Sqrt.
- Each helper function is defined inside of the function that needs it.
Way 1
- All the helper functions are defined in a local statement outside of Sqrt.
local
fun {Improve Guess X} ... end
fun {GoodEnough Guess X} ... end
fun {SqrtIter Guess X}
if {GoodEnough Guess X} then Guess
else
{SqrtIter {Improve Guess X} X}
end
end
end
in
fun {Sqrt X}
Guess=1.0
in
{SqrtIter Guess X}
end
end
Way 2
- Each helper function is defined inside of the function that needs it.
fun {Sqrt X}
fun {SqrtIter Guess X}
fun {Improve Guess X} ... end
fun {GoodEnough Guess X} ... end
in
if {GoodEnough Guess X} then Guess
else
{SqrtIter {Improve Guess X} X}
end
end
Guess=1.0
in
{SqrtIter Guess X}
end
Way 2, simplified
- Each helper function sees the arguments of its enclosing function as external references.
- This means we can remove these arguments from the helper functions.
fun {Sqrt X}
fun {SqrtIter Guess}
fun {Improve} ... end
fun {GoodEnough} ... end
in
if {GoodEnough} then Guess
else
{SqrtIter {Improve}}
end
end
Guess=1.0
in
{SqrtIter Guess}
end
Final definition
- There is a trade-off between putting the helper definitions outside the function that needs them or putting them inside:
- Putting them inside lets them see the arguments of the main function (therefore they need fewer arguments). But each time the main function is called, new helper functions are created.
- Putting them outside means that the functions are created once, for all calls to the main function. But then the helper functions need more arguments.
- The final definition (below) balances that trade-off (between efficiency and visibility).
- SqrtIter is local to Sqrt.
- Improve and GoodEnough are outside SqrtIter.
fun {Sqrt X}
fun {Improve Guess} ... end
fun {GoodEnough Guess} ... end
fun {SqrtIter Guess}
if {GoodEnough Guess} then Guess
else
{SqrtIter {Improve Guess}}
end
end
Guess=1.0
in
{SqrtIter Guess}
end
Control abstraction
- Here is once again the schema for the iteration control flow:
- We will now turn that schema into a program component, making the schema a control abstraction.
- The schema has to be parameterized by extracting the parts that vary from one use to another.
- IsDone and Transform are such parts.
- The schema has to be parameterized by extracting the parts that vary from one use to another.
fun {Iterate S IsDone Transform}
if {IsDone S} then S
else S1 in
S1 = {Transform S}
{Iterate S1 IsDone Transform}
end
end
- Info:
- Arguments IsDone and Transform accept one-argument functions.
- We can make Iterate behave like SqrtIter by passing it the functions GoodEnough and Improve:
fun {Sqrt X}
{ Iterate
1.0
fun {$ G} {Abs X-G*G}/X < 0.00001 end
fun {$ G} (G+X/G)/2.0 end }
end
- This is a powerful way to structure a program because it separates the general control flow from this particular use.
Assignment 3
- The half-interval method is a technique for finding roots of a function f (the x values such that the function f(x) = 0), where f is a continuous real function.
- If we are given points a and b such that f(a) < 0 < f(b), then f must have at least one root between a and b.
- Steps to calculate a root:
- Let
x = (a+b)/2and compute f(x). - If f(x) > 0 then f must have a root between a and x, otherwise the root is between x and b.
- Repeat until the calculated x is accurate enough.
- Let
- Write a declarative program to solve this problem using the techniques of iterative computation.
- {HalfInterRoot F A B}
- Pass a continuous real function to the argument F.
- Pass values a and b to arguments A and B.
- Return a value that approximates a root of the function.
Example
Roots of the function: f(x) = x2-2

- {HalfInterRoot F A B}
2. Recursive computation
- Iterative computation is a special case of recursive computation.
- While iterative computation calls itself once (and has a constant stack size), recursive computation can call itself more than once.
- Recursion occurs in two major ways: in functions and in data types.
- A function is recursive if its definition has at least one call to itself.
- A data type is recursive if it is defined in terms of itself (e.g., list).
Print Gallery (M. C. Escher)
- Iterative computation has a constant stack size, which is not always the case with recursive computation.
- It is important to avoid growing stack size whenever possible.
- The factorial implementation below is an example of a recursive computation that is not iterative (its stack size is growing).
- Factorial mathematical definition:

- Implementation:
fun {Fact N}
if N==0 then 1
elseif N>0 then N*{Fact N-1}
else raise domainError end
end
end
- Info:
- This defines the factorial of a big number in terms of the factorial of a smaller number.
- Since all numbers are nonnegative, they will bottom out at zero.
Growing stack size
- In the factorial implementation above, multiplication comes after the recursive call (tail recursion).
- During the recursive call the stack has to keep information about the multiplication for when the recursive call returns.
Converting a recursive to an iterative computation
- Previous implementation for factorial calculation:
3! = (3*(2*(1*1)))
- We can rearrange the numbers like this:
3! = (((1*3)*2)*1)
- The second calculation can be done incrementally.
- The iterative definition that calculates factorial in this way is:
fun {Fact N}
fun {FactIter N A}
if N==0 then A
elseif N>0 then {FactIter N-1 A*N}
else raise domainError end
end
end
in
{FactIter N 1}
end
- Info:
- The function that does the iteration, FactIter, has a second argument A without which iterative factorial would not be possible. It effectively serves as memory for the intermediate results of multiplication.
3. Programming with recursion
- This section shows basic techniques for programming with lists, queues, and trees.
Programming with lists
- The basic techniques of programming with lists are:
- Thinking recursively (solve a problem in terms of smaller versions of the problem).
- Converting recursive to iterative computations (naive list programs are often wasteful).
- Constructing programs by following the type (recursive structure of a program often closely mirrors the definition of a type with which it calculates).
Thinking recursively
- A list is a recursive data structure: it is defined in terms of a smaller version of itself.
- The function that calculates on lists consists of two parts:
- A base case: For small lists, the function computes the answer directly.
- A recursive case: For bigger lists, the function computes the result in terms of the results of one or more smaller lists.
- Example of a recursive function that calculates the length of a list:
fun {Length Ls}
case Ls
of nil then 0
[] _|Lr then 1+{Length Lr}
end
end
{Browse {Length [a b c]}}
- Info:
- The base case is the empty list nil, for which the function returns 0.
- The recursive case is any other list.
- If the list has length n, then its tail has length n-1. As the tail is smaller than the original list, the program will terminate.
- Example of a function that appends two lists Ls and Ms together to make a third list:
fun {Append Ls Ms}
case Ls
of nil then Ms
[] X|Lr then X|{Append Lr Ms}
end
end
- Info:
- The function follows two properties of append:
- append(nil, m) = m
- append(x|t, m) = x | append(t, m)
- The recursive case always calls Append with a smaller first argument, so the program terminates.
- The function follows two properties of append:
Exercise 1
- Define the function Nth to get the nth element of a list.
- {Nth Xs N}, where Xs is a list and N an integer.
Help
Base case: if N is 1, return the head of the list.
Recursive case: if N>1, calculate *Nth* on the tail.
Exercise 2
- Define the function SumList that sums all the elements of a list of integers.
- {SumList Xs}, where Xs is a list.
Help
Base case: in case Xs is nil, return 0.
Recursive case: otherwise, when Xs is of shape "X|Xr", then sum the head with the result of *SumList* on the tail.
Naive recursive definition
- Let us define a function to reverse the elements of a list.
- Recursive definition of list reversal:
- reverse(nil) = nil.
- reverse(X|Xs) = append( reverse(Xs), [X] ).
- Implementation:
fun {Reverse Xs}
case Xs
of nil then nil
[] X|Xr then
{Append {Reverse Xr} [X]}
end
end
- Reverse execution time:
- N recursive calls (which contain calls to Append).
- Each Append call will process a list of length n/2 on average.
- The total execution time is therefore proportional to n*n/2, namely n2.
- We would expect that reversing a list would take time proportional to the input length and not to its square.
- Reverse stack size:
- The stack size grows with the input list length (recursive computation that is not iterative).
- Naively following the reverse recursive definition has given us an inefficient result.
Converting recursive to iterative computations
- Here we will see how to convert recursive computations into iterative ones.
- Instead of using Reverse, we first use a simpler function that calculates the length of a list.
- Naive implementation:
fun {Length Xs}
case Xs of
nil then 0
[] _|Xr then
1+{Length Xr}
end
end
- This function is linear in time, but the stack size is proportional to the recursive depth.
- This occurs because the addition 1+{Length Xr} happens after the recursive call.
- Iterative implementation:
local
fun {IterLength I Ys}
case Ys
of nil then I
[] _|Yr then
{IterLength I+1 Yr}
end
end
in
fun {Length Xs}
{IterLength 0 Xs}
end
end
- Info:
- It uses an accumulator that effectively serves as a memory for length (the first argument in IterLength function).
- We can use the same technique on Reverse.
- Use the accumulator as memory for "the reverse of the part of the list already seen" instead of its length.
local
fun {IterReverse Rs Ys}
case Ys
of nil then Rs
[] Y|Yr then
{IterReverse Y|Rs Yr}
end
end
in
fun {Reverse Xs}
{IterReverse nil Xs}
end
end
- Now, the Reverse implementation should be both linear-time and iterative computation.
Assignment 4
- Rewrite the function SumList (from Exercise 2) to be iterative using the techniques developed for Length.
Assignment 5
- The Append implementation from a previous section is iterative (the stack size is constant):
fun {Append Ls Ms}
case Ls
of nil then Ms
[] X|Lr then X|{Append Lr Ms}
end
end
- It is iterative in the declarative paradigm (which has dataflow variables, allowing the unfinished list to have unbound variables).
- In the functional paradigm (which is a subset of the declarative paradigm), where variables must be immediately bound, the implementation above is not iterative.
- In the functional paradigm the stack size would be proportional to the recursive depth because the list appending operation ("|") would execute after the recursion.
- Write an iterative append that would be iterative even in the functional paradigm (restrict the declarative paradigm to calculate with values only - no unbound variables).
- You will need the Reverse function and a new iterative function that appends the reverse of a list to another list (which is not reversed).
Hint
[1 2] + [3 4] -> append( reverse([1 2]), [3 4] )
[2 1], [3 4] -> 2 | [3 4]
[1], [2 3 4] -> 1 | [2 3 4]
[], [1 2 3 4]
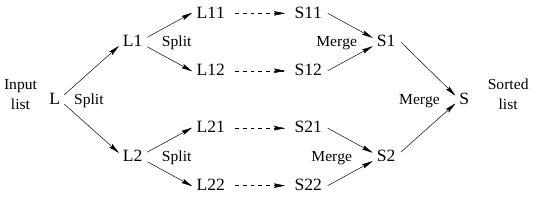
Sorting with mergesort
- Let's define a function that takes a list of numbers and returns a new list sorted in ascending order.
- We use the mergesort algorithm which is based on a simple divide-and-conquer strategy:
- Split the list into two smaller lists (of approximately equal length).
- Use mergesort recursively to sort two smaller lists.
- Merge the two sorted lists together.
proc {Split Xs ?Ys ?Zs}
case Xs
of nil then Ys=nil Zs=nil
[] [X] then Ys=[X] Zs=nil
[] X1|X2|Xr then Yr Zr in
Ys=X1|Yr
Zs=X2|Zr
{Split Xr Yr Zr}
end
end
fun {Merge Xs Ys}
case Xs # Ys
of nil # Ys then Ys
[] Xs # nil then Xs
[] (X|Xr) # (Y|Yr) then
if X<Y then X|{Merge Xr Ys}
else Y|{Merge Xs Yr}
end
end
end
fun {MergeSort Xs}
case Xs
of nil then nil
[] [X] then [X]
else Ys Zs in
{Split Xs Ys Zs}
{Merge {MergeSort Ys} {MergeSort Zs}}
end
end
Accumulators
- Accumulator programming is a technique for writing iterative computations (used in IterLength and IterReverse functions we saw before).
- The main idea is to carry state forward at all times and never do a return calculation.
Mergesort with an accumulator
- The previous definition of mergesort first calls the function Split to divide the input list into two halves.
- The simpler way to do mergesort is by using an accumulator.
- The parameter represents "the part of the list still to be sorted."
- The specification of MergeSortAcc:
- S#L2 = {MergeSortAcc L1 N} takes an input list L1 and an integer N. It returns two results: S, the sorted list of the first N elements of L1, and L2, the remaining elements of L1. The two results are paired together with the # tupling constructor.
- Implementation:
fun {MergeSort Xs}
fun {MergeSortAcc L1 N}
if N==0 then
nil # L1
elseif N==1 then
[L1.1] # L1.2
elseif N>1 then
NL = N div 2
NR = N-NL
Ys # L2 = {MergeSortAcc L1 NL}
Zs # L3 = {MergeSortAcc L2 NR}
in
{Merge Ys Zs} # L3
end
end
in
{MergeSortAcc Xs {Length Xs}}.1
end
- This version has the same time complexity as the previous version, but it uses less memory because it does not create the two split lists.
Queues
- A queue is a sequence of elements with an insert and a delete operation.
- The insert operation adds an element to one end of the queue and the delete operation removes an element from the other end.
- Queues have FIFO (First-In-First-Out) behavior.
A naive queue
- If a list L represents the queue content, then inserting X gives the new queue X|L. Deleting Y is done by calling {ButLast L Y L1} (which binds Y to the deleted element and returns the new queue in L1):
declare L X L1
proc {ButLast L ?X ?L1}
case L
of [Y] then X=Y L1=nil
[] Y|L2 then L3 in
L1 = Y|L3
{ButLast L2 X L3}
end
end
L = [1 2 3 4]
{ButLast L X L1}
{Browse L1}
{Browse X}
- ButLast is slow: it takes time proportional to the number of elements in the queue.
Amortized constant-time ephemeral queue
- Amortized constant-time: a sequence of n function/procedure calls takes a total time that is proportional to some constant times n.
- Ephemeral queue: there can be only one version of the queue in use at any time.
- Definition of an ephemeral queue that has amortized constant-time:
fun {NewQueue} q(nil nil) end
fun {Check Q}
case Q of q(nil R) then q({Reverse R} nil) else Q end
end
fun {Insert Q X}
case Q of q(F R) then {Check q(F X|R)} end
end
fun {Delete Q X}
case Q of q(F R) then F1 in F=X|F1 {Check q(F1 R)} end
end
fun {IsEmpty Q}
case Q of q(F R) then F==nil end
end
- Info:
- This uses the pair q(F R) to represent the queue. F and R are lists.
- F represents the front of the queue and R represents the back of the queue in reverse.
- In "Delete" function, "F=X|F1" binds the head of list F to X and the tail to F1.
- Example:
Q1 = {NewQueue} % Q1 = q(nil nil)
Q2 = {Insert Q1 1} % Q2 = q([1] nil)
Q3 = {Insert Q2 2} % Q3 = q([1] [2])
Q4 = {Insert Q3 3} % Q4 = q([1] [3 2])
Q5 = {Insert Q4 4} % Q5 = q([1] [4 3 2])
Q6 = {Insert Q5 5} % Q6 = q([1] [5 4 3 2])
Q7 = {Delete Q6 X} % Q7 = q([2 3 4 5] nil) X=1
Q8 = {Delete Q7 X} % Q8 = q([3 4 5] nil) X=2
Q9 = {Insert Q8 6} % Q9 = q([3 4 5] [6])
Q10 = {Insert Q9 7} % Q10 = q([3 4 5] [7 6])
Q11 = {Delete Q10 X} % Q11 = q([4 5] [7 6]) X=3
Assignment 6
- Consider the FIFO queue defined above.
- What happens if you delete an element from an empty queue? Explain.
Trees
- Trees are recursive data structures.
- A tree is either a leaf node or a node that contains one or more trees.
- Nodes can carry additional information.
- One possible definition:

- One of many applications for the tree structure: https://www.youtube.com/watch?v=TrrbshL_0-s
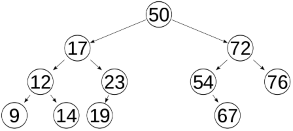
Ordered binary tree
- An ordered binary tree (OBTree) is a binary tree in which each node includes a pair of values:

- Non-leaf nodes include the values OValue and Value.
- OValue (Ordered Value) is a value by which the nodes in a tree are ordered - Key.
- Value is carried along with no particular condition imposed on it - Information.
Storing information in trees
- An ordered binary tree can be used as a repository of information.
- We have to define three operations: looking up, inserting, and deleting entries.
- Looking up information in an ordered binary tree means to search for a given key, and if it is found return the information present at that node.
- With the orderdness condition, the search algorithm can eliminate half the remaining nodes at each step. The number of operations is proportional to the depth of the tree.
- Lookup:
fun {Lookup X T}
case T
of leaf then notfound
[] tree(Y V T1 T2) andthen X==Y then found(V)
[] tree(Y V T1 T2) andthen X<Y then {Lookup X T1}
[] tree(Y V T1 T2) andthen X>Y then {Lookup X T2}
end
end
- To insert or delete information in an ordered binary tree, we construct a new tree that is identical to the original except that it has more or less information.
- Insert:
fun {Insert X V T}
case T
of leaf then tree(X V leaf leaf)
[] tree(Y W T1 T2) andthen X==Y then tree(X V T1 T2)
[] tree(Y W T1 T2) andthen X<Y then tree(Y W {Insert X V T1} T2)
[] tree(Y W T1 T2) andthen X>Y then tree(Y W T1 {Insert X V T2})
end
end
- Calling {Insert X V T} returns a new tree that has the pair (X V) inserted in the right place.
- If T already contains X, then the new tree replaces the old information with V.
Deletion and tree reorganizing
- The delete operation is not as simple as Lookup and Insert, here is a first try (which is wrong):
fun {Delete X T}
case T
of leaf then leaf
[] tree(Y W T1 T2) andthen X==Y then leaf
[] tree(Y W T1 T2) andthen X<Y then tree(Y W {Delete X T1} T2)
[] tree(Y W T1 T2) andthen X>Y then tree(Y W T1 {Delete X T2})
end
end
- Calling {Delete X T} should return a new tree that has no node with key X.
- The error is that when
X==Y, the whole subtree is removed instead of just a single node.
- The error is that when
- When
X==Y, we have to reorganize the subtree so that it no longer has the key Y but is still an ordered binary tree.
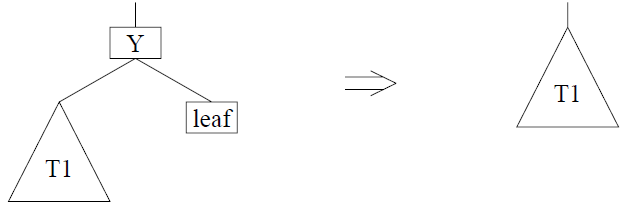
Deleting node Y when one subtree is a leaf (easy case)

Deleting node Y when neither subtree is a leaf (hard case)
- To fix the Delete function, we define a function {RemoveSmallest T2} that returns the smallest key of T2, its associated value, and a new tree that lacks this key:
fun {RemoveSmallest T}
case T
of leaf then none
[] tree(Y V T1 T2) then
case {RemoveSmallest T1}
of none then Y#V#T2
[] Yp#Vp#Tp then Yp#Vp#tree(Y V Tp T2)
end
end
end
- The new Delete function that uses the RemoveSmallest function:
fun {Delete X T}
case T
of leaf then leaf
[] tree(Y W T1 T2) andthen X==Y then
case {RemoveSmallest T2}
of none then T1
[] Yp#Vp#Tp then tree(Yp Vp T1 Tp)
end
[] tree(Y W T1 T2) andthen X<Y then
tree(Y W {Delete X T1} T2)
[] tree(Y W T1 T2) andthen X>Y then
tree(Y W T1 {Delete X T2})
end
end
Tree traversal
- Two basic traversals:
- depth-first: for each node, it visits first the left-most subtree, then the node itself, and then the right-most subtree.
- breadth-first: it first traverses all nodes at depth 0, then all nodes at depth 1, etc.
- Depth-first traversal that displays each node's key and information:
proc {DFS T}
case T
of leaf then skip
[] tree(Key Val L R) then
{DFS L}
{Browse Key#Val}
{DFS R}
end
end
- Depth-first traversal that calculates a result (a list of all key/value pairs):
proc {DFSAcc T S1 ?Sn}
case T
of leaf then Sn=S1
[] tree(Key Val L R) then S2 S3 in
{DFSAcc L S1 S2}
S3 = Key#Val|S2
{DFSAcc R S3 Sn}
end
end
- To implement breadth-first traversal, we need a queue to keep track of all the nodes at a given depth.
- The next node to visit comes from the head of the queue.
- The node's two subtrees are added to the tail of the queue.
- They will be visited when all the other nodes of the queue have been visited (i.e., all the nodes at the current depth).
- Breadth-first traversal implementation with queues from the previous section:
proc {BFS T}
fun {TreeInsert Q T}
if T\=leaf then {Insert Q T} else Q end
end
proc {BFSQueue Q1}
if {IsEmpty Q1} then skip
else
X Q2 = {Delete Q1 X}
tree(Key Val L R) = X
in
{Browse Key#Val}
{BFSQueue {TreeInsert {TreeInsert Q2 L} R}}
end
end
in
{BFSQueue {TreeInsert {NewQueue} T}}
end
Exercise 3
- Implement breadth-first traversal (BFSAcc) that calculates a list of key/value pairs (with accumulator, similarly as is done with the depth-first algorithm).
Assignment 7
- Write a function (ListToTree) that takes an unordered list of key/value pairs and returnes an ordered binary tree.
Tree = {ListToTree [5#o 4#w 1#l 6#l 7#l 0#d 9#h 8#e 3#o 2#r]}- You will need the function "Insert" defined in this section to insert each node into the tree that is being constructed.
- Use the function DFSAcc to turn the ordered binary tree into an ordered list.
4. Higher-order programming
- Higher-order programming is the collection of programming techniques that become available when using procedure (or function) values in programs.
Basic operations
- Four basic operations that underlie all the techniques of higher-order programming:
- Procedural abstraction: the ability to convert any statement into a procedure value.
- Genericity: the ability to pass procedure values as arguments to a procedure call.
- Instantiation: the ability to return procedure values as results from a procedure call.
- Embedding: the ability to put procedure values in data structures.
Procedural abstraction
- Any statement can be packaged into a procedure, which does not execute the statement, but instead creates a procedure value (a closure).
- Executing the procedure value gives exactly the same result as executing the statement.
Genericity
- To make a function generic is to let any specific entity in the function body become an argument of the function.
- The specific entity is given when the function is called.
- Consider the function SumList, which we will make a generic version of:
fun {SumList L}
case L
of nil then 0
[] X|L1 then X+{SumList L1}
end
end
- This function has two specific entities: the number zero and the operation plus. The zero is a neutral element for the plus operation.
- Any neutral element and any operation are possible. We give them as parameters, which gives the following generic function:
fun {FoldR L F U}
case L
of nil then U
[] X|L1 then {F X {FoldR L1 F U}}
end
end
- SumList definition as a special case of FoldR:
fun {SumList L}
{FoldR L fun {$ X Y} X+Y end 0}
end
Exercise 4
- Use FoldR to define the function "ProductList" that calculates the product of all elements in the list.
- Use FoldR to define the function "Some" that returnes true if there is at least one true in the list.
Hint
{Or true false} returns true.
Instantiation
- An example of instantiation is a function MakeSort that returnes a sorting function:
fun {MakeSort F}
fun {$ L}
{Sort L F}
end
end
Exercise 5
- Use MakeSort to instantiate a sorting function and sort a list of integers (descending).
Hint
Function "Sort" accepts a list L and a function F. The function F should accept two sortable values (e.g., two integers) and return a boolean value that dictates how those two values should be sorted.
Embedding
- Procedure values can be put in data structures. This has many uses:
- Explicit lazy evaluation (delayed evaluation): building a data structure on demand.
- Modules: records that group together a set of related operations.
- Software component: a generic procedure that takes a set of modules as input arguments and returnes a new module.
5. Abstract data types
- A data type (or simply type) is a set of values together with a set of operations on these values.
- A type is abstract if it is completely defined by its set of operations, regardless of the implementation.
- It is possible to change the implementation of the type without changing its use.
A declarative stack
- A stack is a simple example of an abstract data type.
- <Stack T> contains elements of type T (T being any type).
- Assume the stack has four operations, with following types:
- < fun {NewStack}: <Stack T> >
- < fun {Push <Stack T> T}: <Stack T> >
- < fun {Pop <Stack T> T}: <Stack T> >
- < fun {IsEmpty <Stack T>}: <Bool> >
- This set of operations and their types defines the interface of the abstract data type. These operations satisfy certain laws:
- A new stack is always empty.
- {IsEmpty {NewStack}} = true.
- Pushing an element and then popping gives the same element back.
- For any E and S0, S1 = {Push S0 E} and S0 = {Pop S1 E} hold.
- No elements can be popped off an empty stack.
- {Pop {EmptyStack}} raises an error.
- A new stack is always empty.
- All implementations have to satisfy these laws. Here is an implementation of the stack:
fun {NewStack} nil end
fun {Push S E} E|S end
fun {Pop S E} case S of X|S1 then E=X S1 end end
fun {IsEmpty S} S==nil end
- A program that uses the stack will work with any implementation that satisfies the defined laws.
- Notice: "Pop" is written using a functional syntax, but one of its arguments is an output.
Exercise 6
- Write an example program that creates a stack, pushes a few elements, pops a few, and checks if the stack is empty.
A declarative dictionary
- Another (extremely useful) example of an abstract data type is dictionary.
- A dictionary is a finite mapping from a set of simple constants to a set of language entities.
- Each constant maps to one entity.
- The constants are called keys, and the entites are called values.
- Assume the dictionary (<Dict>) has four operations, with following types:
- < fun {NewDict}: <Dict> >
- Returnes a new empty dictionary.
- < fun {Put <Dict> <Key> <Value>}: <Dict> >
- Takes a dictionary and returnes a new dictionary that adds the mapping <Key> -> <Value>. If <Key> already exists, then the new dictionary replaces its mapping with the new one.
- < fun {Get <Dict> <Key>}: <Value> >
- Returnes the value corresponding to <Key>. If there is none, an exception is raised.
- < fun {Domain <Dict>}: <List <Key>> >
- Returnes a list of keys in <Dict>.
- < fun {NewDict}: <Dict> >
List-based implementation
- Dictionary can be implemented with a list representing the dictionary.
- List contains Key#Value pairs that are sorted on the key.
- A list-based implementation would be extremely slow for large dictionaries.
- The number of operations is O(n) for dictionaries with n keys (for both Put and Get).
Tree-based implementation
- A more efficient implementation of dictionaries is possible by using an ordered binary tree.
- Put is simply Insert, and Get is very similar to Lookup.
- In this implementation, the Put and Get operations take O(log n) time and space for a tree with n nodes.
State-based implementation
- We can do even better than the tree-based implementation by leaving the declarative model behind and using explicit state.
- Using state can reduce the execution time of Put and Get operations to amortized constant time.